Tin Xe Nâng
Phân tích hệ thống Logistics tự động hóa 2026: AGV, AMR và công nghệ Robot kho bãi
Logistics tự động đang chuyển từ kiểu “lắp thêm vài thiết bị” sang thiết kế lại cách kho vận hành dựa trên dữ liệu. Trong bối cảnh Logistics 4.0 và Tự động hóa chuỗi cung ứng, các dự án năm 2026 thường xoay quanh ba nhóm công nghệ. Công nghệ AGV/AMR lo vận chuyển nội bộ linh hoạt. AS/RS tập trung tối ưu lưu trữ và xuất nhập trong kho cao tầng. Robot pick-pack kết hợp AI giúp tăng tốc xử lý đơn, đặc biệt ở thương mại điện tử. Logistics 4.0 và Tự động hóa chuỗi cung ứng.
Định nghĩa ngắn (40–60 từ): Logistics tự động là việc dùng robot, băng tải, hệ thống lưu trữ tự động và phần mềm điều phối để thay thế hoặc hỗ trợ thao tác thủ công trong kho. Mục tiêu là tăng thông lượng, giảm sai sót, giữ ổn định chất lượng dịch vụ và cải thiện an toàn lao động, đồng thời vẫn kiểm soát chi phí sở hữu.
Bài viết này đi vào cách so sánh hiệu suất AGV, AMR, AS/RS trong Hệ thống kho tự động, cách Robot pick-pack dùng thị giác máy tính, khung tính Chi phí đầu tư và ROI cùng TCO tại Việt Nam, các rủi ro Tích hợp hệ thống WMS/WES với ERP, và cách tổ chức mô hình cộng tác Người – Robot để triển khai bền vững cho Kho thông minh. khung tính Chi phí đầu tư và ROI cùng TCO.
So sánh hiệu suất vận hành: AGV, AMR và hệ thống AS/RS
Khái niệm nhanh: AGV (Automated Guided Vehicle) thường chạy theo tuyến hoặc mốc dẫn hướng. AMR (Autonomous Mobile Robot) tự điều hướng dựa trên bản đồ và cảm biến. AS/RS (Automated Storage and Retrieval System) là hệ thống lưu trữ và xuất nhập tự động, thường gồm giá kệ cao tầng và thiết bị lấy hàng như shuttle, stacker crane.
Muốn so sánh “hiệu suất vận hành”, nên tách thành ba lớp. Lớp điều hướng và mức độ dễ thay đổi layout. Lớp Hiệu suất vận hành (Throughput) theo giờ ở các điểm nghẽn. Lớp phù hợp với quy mô và đặc tính SKU. Trong nhiều trường hợp, lựa chọn hợp lý không phải “một công nghệ cho tất cả” mà là phối hợp theo luồng hàng và mức độ tiêu chuẩn hóa quy trình trong Logistics tự động.

Đánh giá tính linh hoạt và khả năng điều hướng: AGV hợp với tuyến cố định, hành lang rõ ràng, ít thay đổi. AMR linh hoạt hơn khi cần đổi vị trí kệ, đổi luồng đi, hoặc làm việc chung với người. Đổi lại, AMR cần quản lý bản đồ, vùng an toàn và kỷ luật vận hành để tránh “kẹt giao thông” ở nút giao, nhất là khi nhiều robot dùng chung một hành lang.
Chỉ số thông lượng trong kho cao tầng: AS/RS thường phát huy ở bài toán mật độ lưu trữ và nhịp xuất nhập ổn định, hỗ trợ Tối ưu hóa không gian kho bãi khi chi phí mặt bằng tăng. Thông lượng thực tế không chỉ do máy quyết định. Nó còn phụ thuộc điểm giao tiếp với băng tải, trạm pick và cách gom đơn (wave/batch, zone picking). Khi thiết kế, nên mô phỏng theo kịch bản giờ cao điểm thay vì chỉ nhìn thông số danh định của nhà sản xuất.
|
Tiêu chí |
AGV |
AMR |
AS/RS |
|---|---|---|---|
|
Linh hoạt thay đổi layout |
Thấp đến trung bình |
Cao |
Thấp (phụ thuộc kết cấu) |
|
Phù hợp kho cao tầng, mật độ cao |
Trung bình |
Trung bình |
Cao |
|
Điểm rủi ro thường gặp |
Tuyến bị chặn, khó mở rộng nhanh |
Kẹt nút giao, cần quy hoạch vùng an toàn |
Đầu tư lớn, phụ thuộc bảo trì và phụ tùng |
|
Khi nào cân nhắc |
Luồng lặp lại, ít biến động |
SKU biến động, cần mở rộng theo giai đoạn |
Cần tối ưu không gian và ổn định đầu ra |
Phân tích E-E-A-T theo quy mô: Với kho vừa, nhu cầu thay đổi nhanh thường khiến AMR và băng tải mô-đun dễ triển khai theo từng bước, phù hợp lộ trình Chuyển đổi số logistics theo giai đoạn. Với kho lớn, nếu chi phí đất cao hoặc cần lưu trữ dày, AS/RS đáng cân nhắc trong Hệ thống kho tự động. Tuy nhiên, bạn cần kế hoạch bảo trì và phương án vận hành khi một cụm bị dừng. Trước khi chốt công nghệ, nên đo dữ liệu đơn hàng 8–12 tuần để xác định giờ cao điểm, tỷ lệ đơn lẻ và mức độ “đụng nhau” của SKU.
Công nghệ Robot Pick-Pack và ứng dụng AI trong xử lý đơn hàng
Robot pick-pack giải bài toán tiêu tốn nhân lực nhất trong kho. Nó không chỉ là “cánh tay robot”. Một hệ thống chạy ổn thường gồm thị giác máy tính để nhận diện, phần mềm chọn chiến lược gắp, cơ cấu kẹp phù hợp nhiều loại bao bì và trạm đóng gói có kiểm tra trọng lượng hoặc quét mã để giảm sai sót. Trong một Kho thông minh, các trạm này hay được thiết kế theo dạng “cell” tiêu chuẩn để mở rộng dần khi sản lượng tăng.

Cơ chế nhận diện hình ảnh trong phân loại hàng hóa: Computer Vision thường dùng camera RGB và đôi khi thêm cảm biến chiều sâu để ước lượng tư thế vật. Machine Learning giúp phân loại SKU, đọc nhãn hoặc phát hiện lỗi như bao bì rách. Độ khó tăng mạnh với hàng phản quang, túi nilon mềm, hoặc sản phẩm nhìn gần giống nhau nhưng khác phiên bản. Vì vậy, nên có quy trình “dạy lại” mô hình khi SKU thay đổi theo mùa, đồng thời quản trị dữ liệu ảnh và nhãn (dataset) như một tài sản vận hành của Logistics tự động.
-
Tối ưu hóa đóng gói cho thương mại điện tử: tự chọn kích thước thùng theo thể tích đơn, in nhãn tự động, chèn vật liệu chống sốc theo quy tắc và đối soát cân nặng để phát hiện thiếu hàng.
-
Giảm vòng lặp xử lý lỗi: thiết kế lane “ngoại lệ” cho đơn có hàng dễ vỡ, hàng bị dính hoặc thiếu dữ liệu mã vạch.
-
Đo hiệu quả đúng cách: theo dõi tỷ lệ gắp thành công lần đầu, thời gian xử lý ngoại lệ và tỷ lệ sai sót theo ca.
Ví dụ triển khai tại châu Á: Nhiều trung tâm phân loại thương mại điện tử ở Nhật Bản và Trung Quốc dùng robot phân loại (sorting robots) chạy trên mặt sàn dạng “grid” hoặc băng tải để đẩy kiện về đúng cửa. Theo báo cáo “World Robotics 2024” của International Federation of Robotics (IFR), châu Á và châu Đại Dương chiếm khoảng 70% lượng robot công nghiệp lắp đặt mới năm 2023. Dù robot pick-pack trong kho có khác robot công nghiệp truyền thống, số liệu này vẫn cho thấy tốc độ đầu tư tự động hóa mạnh trong khu vực, kéo theo hệ sinh thái tích hợp và nguồn nhân lực vận hành ngày càng sẵn hơn cho Tự động hóa chuỗi cung ứng.
Mô hình tính toán ROI và Tổng chi phí sở hữu (TCO) tại Việt Nam
Đánh giá ROI cho kho tự động hay sai ở hai điểm. Thứ nhất, chỉ tính tiết kiệm nhân công mà bỏ qua chi phí tích hợp và vận hành. Thứ hai, dùng năng suất “lý thuyết” thay vì năng suất sau khi trừ ngoại lệ. Cách thực tế hơn là dựng mô hình TCO 3–5 năm, rồi đặt các kịch bản tăng trưởng đơn hàng và biến động SKU để ra quyết định đầu tư cho Hệ thống kho tự động.
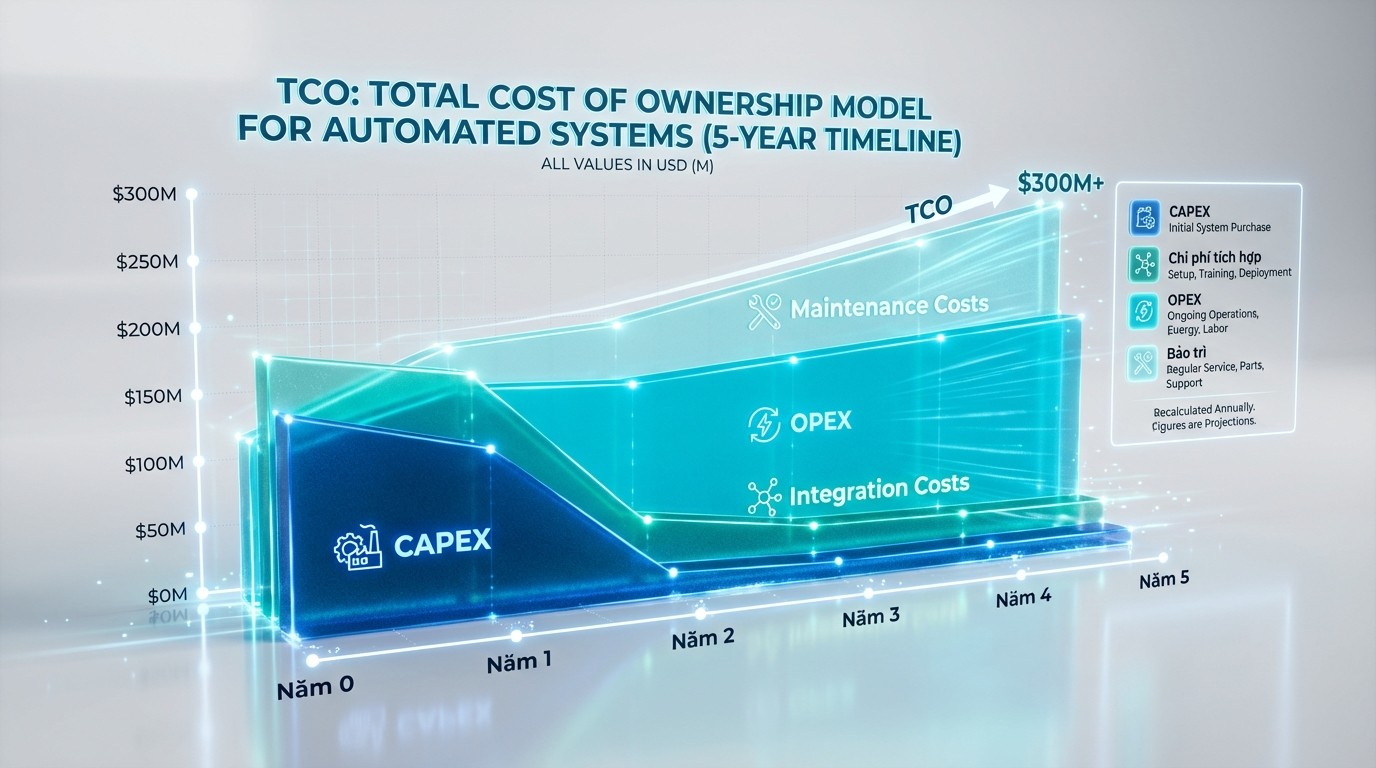
Cấu trúc CAPEX: thường gồm phần cứng (robot, sạc, băng tải, giá kệ, cảm biến an toàn), phần mềm (điều phối robot, WES, giấy phép), hạ tầng (wifi công nghiệp, mạng, sàn, PCCC) và chi phí tích hợp. Với doanh nghiệp ở Việt Nam, phần “làm cho chạy ổn” thường nằm ở tích hợp dữ liệu, chuẩn hóa mã hàng và thay đổi quy trình nhiều hơn dự đoán ban đầu, nhất là khi triển khai Logistics 4.0 đồng thời với tái cấu trúc vận hành.
OPEX và bảo trì dự đoán: gồm điện, phụ tùng hao mòn, hợp đồng hỗ trợ và nhân sự kỹ thuật. Bảo trì dự đoán (predictive maintenance) hữu ích khi có dữ liệu lỗi, số chu kỳ hoạt động, nhiệt độ, rung và nhật ký dừng máy. Nếu chưa đủ dữ liệu, nên bắt đầu từ bảo trì theo tình trạng, kết hợp kiểm tra định kỳ để giảm rủi ro dừng dây chuyền.
-
Chốt phạm vi: tự động hóa công đoạn nào. Vận chuyển nội bộ, lưu trữ, picking hay đóng gói.
-
Chuẩn hóa dữ liệu: SKU, kích thước, trọng lượng, quy cách đóng gói, quy tắc gom đơn.
-
Đo baseline: năng suất hiện tại theo giờ cao điểm, tỷ lệ sai sót, tỷ lệ đơn ngoại lệ.
-
Lập 3 kịch bản: thận trọng, cơ sở, tăng trưởng nhanh. Mỗi kịch bản có giả định về sản lượng và tỷ lệ ngoại lệ.
-
Tính TCO: CAPEX + OPEX + chi phí dừng hệ thống dự kiến. Sau đó mới tính ROI theo lợi ích ròng.
Khung thời gian hoàn vốn: không có một con số chung cho mọi doanh nghiệp. Thực tế phụ thuộc mức lương, số ca làm, chi phí mặt bằng và độ biến động đơn. Nhiều dự án kho tự động đặt mục tiêu hoàn vốn trong khoảng 3–5 năm để giảm áp lực vận hành và kiểm soát rủi ro. Nếu bài toán chính là “mở rộng công suất mà không mở rộng diện tích”, lợi ích gián tiếp về năng lực phục vụ và SLA thường quan trọng không kém phần tiết kiệm nhân sự trong Logistics tự động.
Thách thức tích hợp hệ thống: Kết nối WMS, WES và ERP
Tự động hóa kho thường trục trặc không phải vì robot, mà vì dữ liệu và điều phối. WMS quản lý tồn kho và quy tắc nghiệp vụ. WES điều phối thực thi theo thời gian thực giữa robot, băng tải, trạm pick và người. ERP giữ dữ liệu đơn hàng, tài chính và mua hàng. Nếu không phân vai rõ, hệ thống dễ “đá nhau”, tạo độ trễ và làm giảm tính ổn định của Kho thông minh.
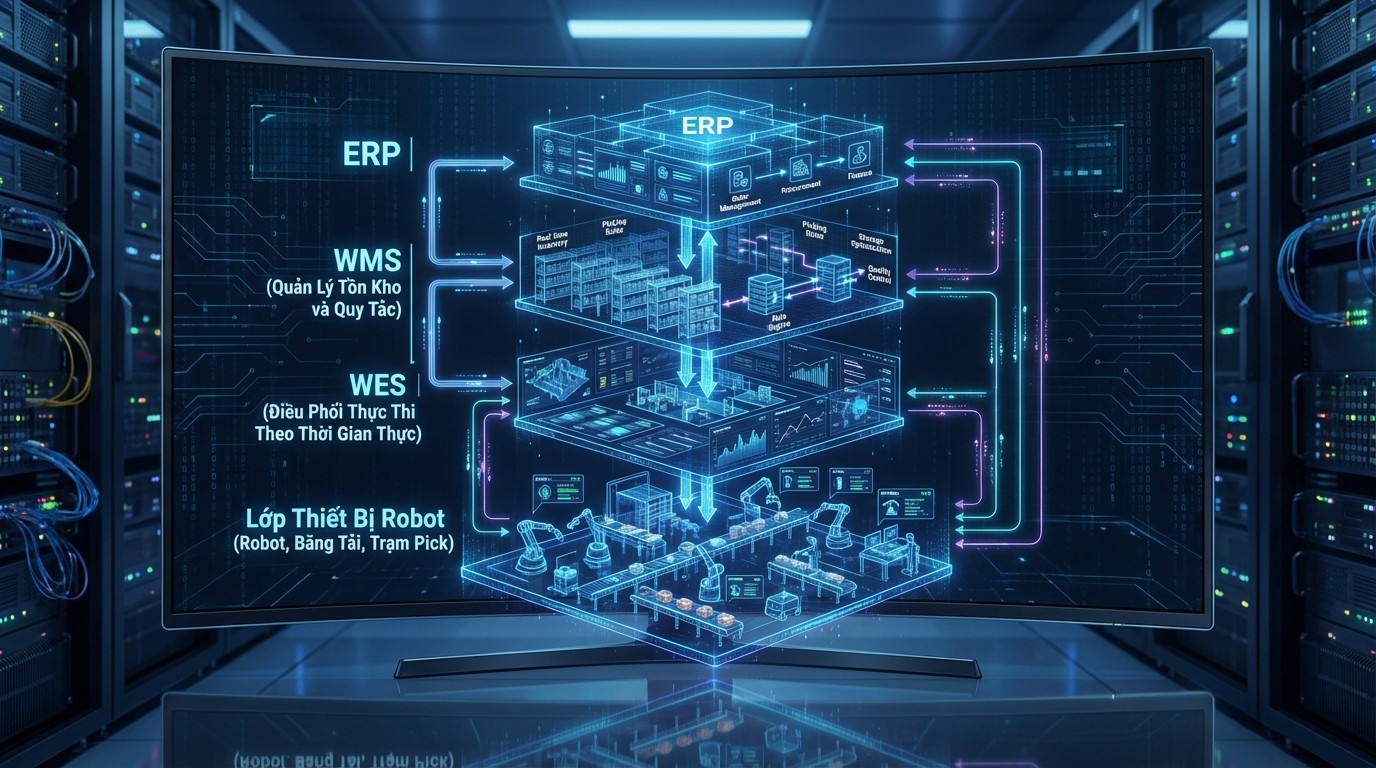
Rào cản kỹ thuật khi đồng bộ dữ liệu thời gian thực: thường gặp nhất là mã hàng không đồng nhất, đơn vị tính khác nhau, tồn kho ảo và cơ chế khóa dữ liệu khi nhiều hệ thống cùng ghi. Ngoài ra, wifi không ổn định hoặc roaming kém có thể làm AMR mất kết nối tạm thời, kéo theo nhiều tác vụ bị treo nếu không có cơ chế “graceful degradation”, hàng đợi tạm và quy tắc phục hồi tác vụ.
Vai trò của WES trong điều phối: WES thường là nơi quyết định “ai làm việc gì, làm lúc nào” dựa trên hàng đợi, năng lực trạm và ưu tiên đơn. Nếu chỉ dùng WMS để điều phối robot, bạn sẽ phải nhồi thêm logic thời gian thực vào WMS. Về lâu dài, việc thay đổi quy trình sẽ khó hơn và rủi ro tăng khi mở rộng Hệ thống kho tự động.
-
Giảm độ trễ: dùng hàng đợi sự kiện, giao tiếp bất đồng bộ và cơ chế retry có kiểm soát thay vì gọi API đồng bộ cho mọi bước.
-
Tránh xung đột giao thức: thống nhất chuẩn giao tiếp thiết bị, hoặc dùng lớp trung gian để chuyển đổi, ghi log và giám sát.
-
Thiết kế luồng ngoại lệ: mất kết nối, hỏng barcode, kẹt băng tải, hết pin robot. Mỗi ngoại lệ cần “đường thoát” rõ ràng để kho vẫn chạy.
Chiến lược chuyển đổi nhân sự và mô hình cộng tác Người – Robot
Kho tự động không làm mất vai trò con người. Nó dịch chuyển công việc từ “làm tay” sang “giám sát, xử lý ngoại lệ và cải tiến”. Nếu không chuẩn bị nhân sự, doanh nghiệp dễ gặp tình trạng thiết bị có nhưng vận hành thiếu ổn định, hoặc phụ thuộc quá mức vào đội kỹ thuật của nhà cung cấp. Đây là rủi ro khá phổ biến khi Tự động hóa chuỗi cung ứng mở rộng nhanh.

Yêu cầu kỹ năng mới cho vận hành kho 2026: hiểu luồng dữ liệu đơn hàng, thao tác trên WMS/WES, đọc bảng điều khiển cảnh báo và tuân thủ quy tắc an toàn trong vùng robot. Tổ trưởng ca thường cần thêm kỹ năng cân bằng tải giữa trạm, quản lý ngoại lệ và phối hợp bảo trì để giảm dừng hệ thống, từ đó giữ ổn định thông lượng của dây chuyền.
-
Lập bản đồ vai trò: phân nhóm vận hành thiết bị, kiểm soát chất lượng, xử lý ngoại lệ và kỹ thuật hiện trường.
-
Đào tạo lại theo tình huống: mô phỏng các lỗi hay gặp như kẹt tuyến, mất mã, hết pin, lệch thùng. Cách học theo “kịch bản” thường hiệu quả hơn học lý thuyết dài.
-
Thiết lập chỉ số vận hành: không chỉ đo số đơn, mà đo thời gian xử lý ngoại lệ, thời gian dừng và tỷ lệ sự cố lặp lại.
-
Lộ trình 60–90 ngày sau go-live: giai đoạn này nên ưu tiên ổn định quy trình, rồi mới tối ưu tốc độ để tránh tạo áp lực khiến nhân sự “lách quy trình”.
Mô hình cobots và an toàn: Robot cộng tác (cobots) phù hợp các công việc lặp lại tại trạm như dán nhãn, đóng thùng hoặc gắp các mặt hàng có hình dạng ổn định. Dù có cảm biến an toàn, bạn vẫn cần đánh giá rủi ro theo khu vực, quy định tốc độ và hướng dẫn thao tác rõ ràng. Ở nhiều kho, cách làm dễ vận hành là để cobots xử lý phần “đều và mệt”, còn người tập trung vào ngoại lệ và kiểm tra cuối để giữ chất lượng dịch vụ của Logistics tự động.
Năm 2026, câu hỏi quan trọng thường không nằm ở “có nên tự động hóa hay không”, mà là tự động hóa phần nào để xử lý đúng điểm nghẽn. AGV, AMR và AS/RS khác nhau về mức linh hoạt, mật độ lưu trữ và ràng buộc hạ tầng. Robot pick-pack và AI giúp tăng tốc xử lý đơn, nhưng bạn cần quản trị ngoại lệ và dữ liệu SKU chặt chẽ. ROI và TCO nên tính theo kịch bản, có dự phòng cho tích hợp và giai đoạn ổn định sau go-live. Cuối cùng, tích hợp WMS/WES/ERP và chuyển đổi kỹ năng nhân sự thường quyết định dự án Kho thông minh có vận hành bền hay không trong hành trình Chuyển đổi số logistics.
Câu hỏi thường gặp (FAQ)
1) AGV và AMR khác nhau ở điểm nào ảnh hưởng trực tiếp đến vận hành?
Khác biệt lớn nhất nằm ở khả năng thích nghi với thay đổi. AGV hợp tuyến cố định và cách kiểm soát đơn giản. AMR linh hoạt khi layout thay đổi và có nhiều giao cắt, nhưng bạn cần quy hoạch luồng di chuyển, vùng an toàn và quản trị “kẹt tuyến” kỹ hơn.
2) Khi nào AS/RS đáng cân nhắc hơn AMR?
Khi mục tiêu chính là tăng mật độ lưu trữ, tận dụng chiều cao kho và nhịp xuất nhập ổn định. AS/RS thường phù hợp kho có sản lượng lớn và ít thay đổi kết cấu. Nếu SKU biến động mạnh và cần mở rộng theo giai đoạn, AMR thường dễ triển khai từng phần hơn.
3) Robot pick-pack có xử lý được hàng “mềm” như túi nilon không?
Có thể, nhưng độ khó cao hơn hàng cứng. Bạn cần chọn cơ cấu kẹp phù hợp, hiệu chỉnh thị giác máy tính và thiết kế quy trình ngoại lệ. Nhiều kho tách riêng nhóm hàng mềm sang trạm bán tự động để giữ thông lượng ổn định.
4) Tính ROI cho kho tự động nên bắt đầu từ đâu?
Bạn nên bắt đầu bằng dữ liệu thực tế 8–12 tuần. Sau đó chốt phạm vi tự động hóa, đo baseline năng suất và lỗi, lập 3 kịch bản sản lượng, rồi tính TCO 3–5 năm gồm CAPEX, OPEX, tích hợp và chi phí dừng dự kiến. Tránh dùng năng suất danh định làm đầu vào duy nhất.
5) Vì sao cần WES nếu đã có WMS?
WMS mạnh về quy tắc nghiệp vụ và tồn kho. WES mạnh về điều phối theo thời gian thực giữa nhiều nguồn lực như robot, băng tải, trạm làm việc và con người. Nếu không có WES, bạn có thể phải “nhét” logic thời gian thực vào WMS, khiến hệ thống khó thay đổi và khó kiểm soát độ trễ.